A plug-and-play open-source robot who can walk.
Bioinspired.
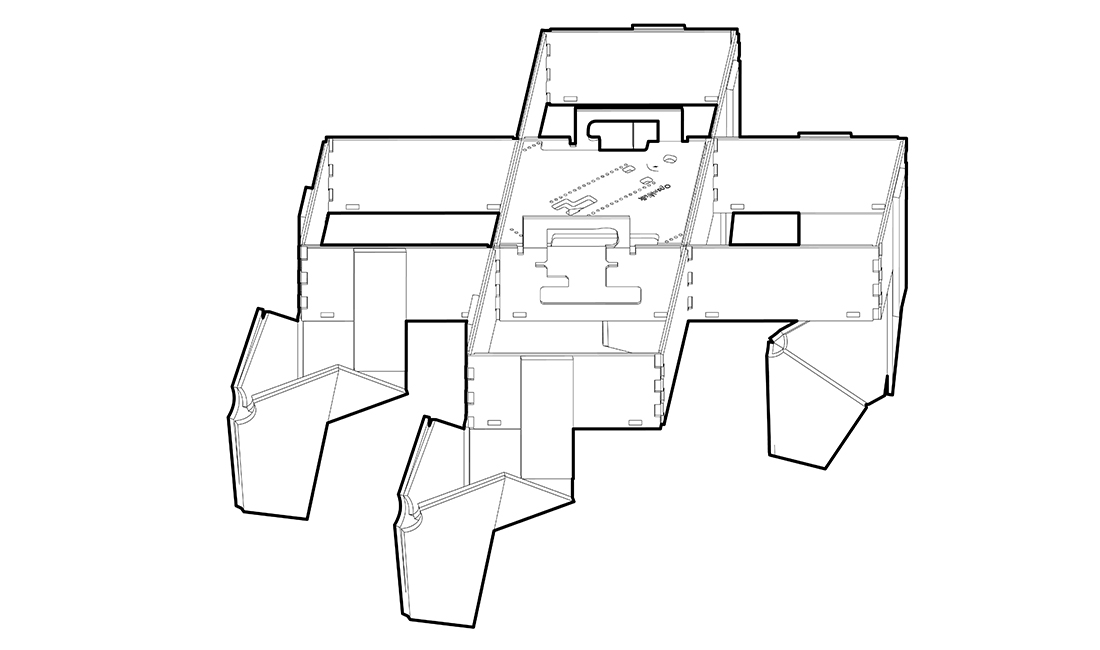
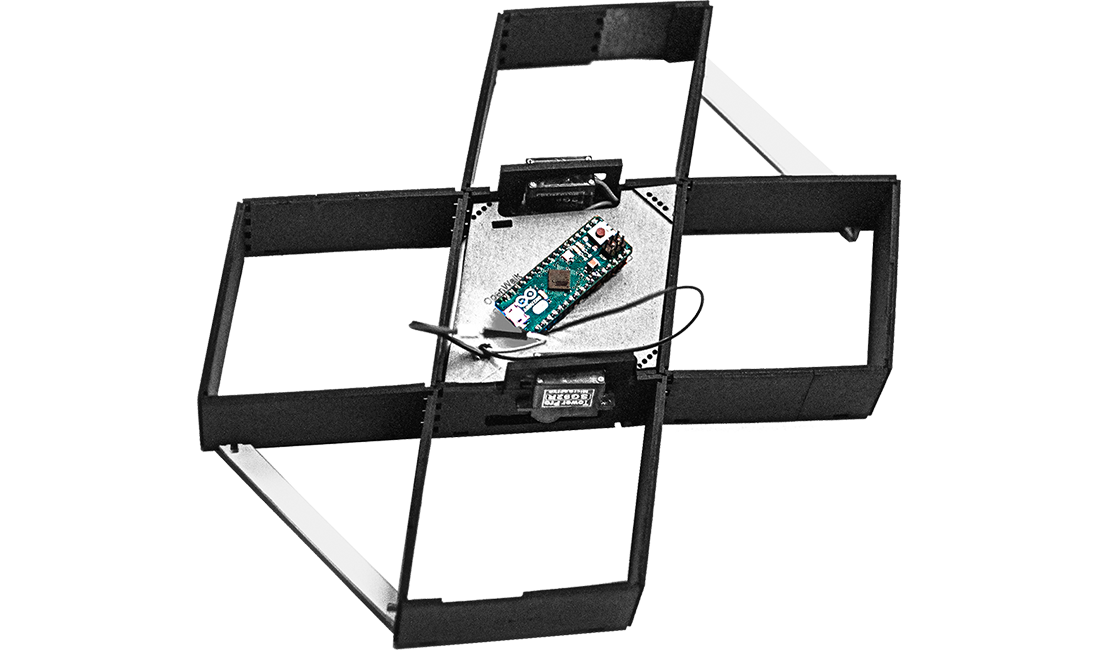
The kinematics behind OpenWalk's motion is inspired on the human body. Our goal was to achieve a natural movement with the minimum resources and extremely simple actuation methods. Thought as a modular robot from the very beginning, OpenWalk is adaptable and can be configured to behave in many different ways, resulting in infinite possible modes of motion.
Open Source.
The source code — available on Github — contains algorithms to tell OpenWalk how to walk forward, backwards, or steer. We hope you take this opportunity to learn, collaborate, and experiment with our design. We can't wait to hear what you do with it.
Plug & Play.
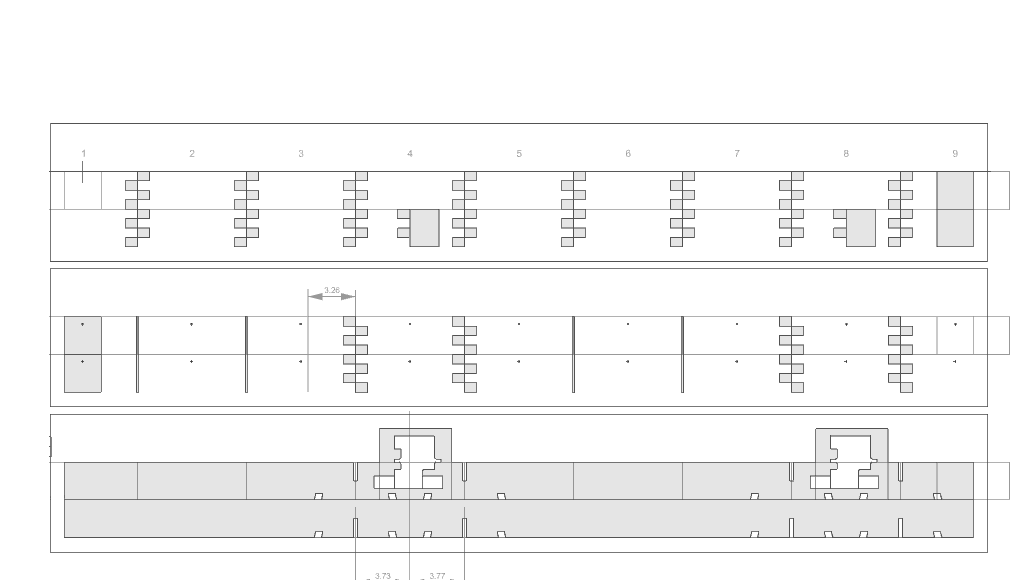
Customize the body by changing the angle restrictions, change the position of the legs, or even modify their shape. The whole robot was built using informal fabrication methods, using chipboard, double-tack mounting film, and a laser-cutter. Download the fabrication drawings and build it yourself!
A plug-and-play open-source robot who can walk.